DEMO 2: Shape from Defocus via I-Divergence
Shape from Defocus and Image Restoration
Demonstration of Shape from Defocus via I-Divegence Minimization method
clear all close all
Data set initialization
load input images and initialize parameters
load('DataSet.mat'); % first resize... scalingFactor = 1/2; I1 = imresize(I1,scalingFactor); % limit number of computations I2 = imresize(I2,scalingFactor); % limit number of computations % ...then select region of interest I(:,:,2) = I1(1:end-10,60:end-50); I(:,:,1) = I2(1:end-10,60:end-50); I = I+(I<1e-3);% make sure images are strictly positive [M,N,K] = size(I); % set the maximum number of iterations MaxIterations = 100; % lens parameters F = 12e-3; % focal length Fnumb = 2; % F number D = F/Fnumb; % aperture (effective lens diameter) gamma = 3e4; % calibration parameter p = 1./(1/F-1./[.52 .85]); % distance CCD-lens % select the domain where the data term is considered win = 3; mask = ones(M,N); mask(1:win,:) = 0; mask(end-win+1:end,:) = 0; mask(:,1:win) = 0; mask(:,end-win+1:end) = 0; dt_data = 2e-1; % data term step dt_reg = 1e0; % regularization term step dx = 1e-3; % discrete gradient step maxDelta = 1; % max amount of relative blur % regularization constant % to avoid division by zero in the preconditioner epsilon = 40*max(I(:))/255; K = length(p); % number of focus settings % preconditioning threshold thresh = 6e-2;
Initialize unknown shape and radiance
initialize depth map with a plane and the radiance with one input image
DepthMap_e = sum(p)*F/(sum(p)-2*F)*ones(M,N); Radiance_e = I(:,:,1);
Start deblurring and shape estimation
integrate the gradient-flow for MaxIterations iterations
for i=1:MaxIterations % Compute approximate gradients for k=1:K % compute blur maps BlurMap_e(:,:,k) = gamma*D/2*abs(1-p(k).*... (1/F-1./DepthMap_e)); BlurMap_dx(:,:,k) = gamma*D/2*abs(1-p(k).*... (1/F-1./(DepthMap_e+dx))); % limit the amount of blur (to prevent out % of memory in defocusApprox) BlurMap_e(:,:,k) = BlurMap_e(:,:,k).*... (BlurMap_e(:,:,k)<2)+2*(BlurMap_e(:,:,k)>=2); BlurMap_dx(:,:,k) = BlurMap_dx(:,:,k).*... (BlurMap_dx(:,:,k)<2)+2*(BlurMap_dx(:,:,k)>=2); end % compute synthetic defocused images and gradients [I_e,F_e,I_dx] = defocusApprox(Radiance_e,BlurMap_e,I,BlurMap_dx); % update radiance (Lucy-Richardson iteration) Radiance_e = Radiance_e.*F_e; % compute gradient of image wrt depth map dIds = (I_dx-I_e)/dx; % compute gradient of i-divergence wrt depth map dEds = sum((1-I./I_e).*dIds,3); % compute preconditioning (positive definite kernel) precond = (epsilon+sum(abs(dIds),3)).^2./(epsilon+sum(I_e,3)); dEds = dEds./precond; % precondition gradient dEds = (abs(dEds) < thresh).*dEds+... (abs(dEds) >= thresh).*thresh.*sign(dEds); % at the boundary use only regularization dDatads = dEds.*mask; % combine data term and regularization term % make sure the iterations are an even number nIt = 2*(floor(dt_reg/1e-1)+1); beta_data = dt_data/nIt; beta_regularization = dt_reg/nIt; for tt=1:nIt % compute gradient of the cost functional % (data term + regularization) wrt the depth map if tt-floor(tt/2)*2==0 dDepth = beta_data*dDatads - beta_regularization*... laplacian(DepthMap_e,'forward'); else dDepth = beta_data*dDatads - beta_regularization*... laplacian(DepthMap_e,'backward'); end % update depth map DepthMap_e = DepthMap_e - dDepth; end end
Results visualization
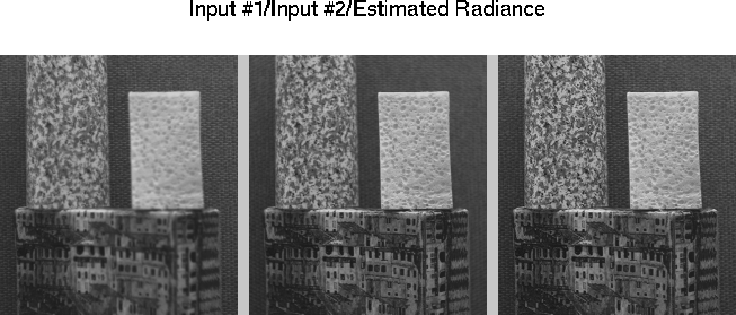
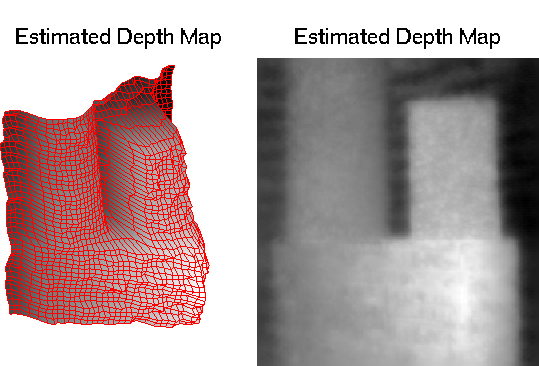
visualize input images, the estimated radiance and the estimated depth map (as a mesh and in gray-scale)
figure(1) subplot(211) image([I(:,:,1) 200*ones(size(I,1),10) ... I(:,:,2) 200*ones(size(I,1),10) ... Radiance_e]) axis equal axis off set(gca,'XTick',[],'YTick',[]); set(gca,'Box','off'); colormap gray(256) title('Input #1/Input #2/Estimated Radiance') drawnow; step = ceil(min([size(DepthMap_e,1) ... size(DepthMap_e,2)])/50); pix2mm = 1/600; [X,Y] = meshgrid(pix2mm*[1:step:size(DepthMap_e,2)],... pix2mm*[1:step:size(DepthMap_e,1)]); axisZ = 1./(1/F-1./p); subplot(223) h = surf(X,-DepthMap_e(1:step:end,1:step:end),-Y,DepthMap_e(1:step:end,1:step:end)); shading interp hold off axis([0 N -axisZ(2) -axisZ(1) -M 0]) set(gca,'XTick',[],'YTick',[],'ZTick',[]); colormap gray(256) title('Estimated Depth Map') view([-1 -2 1]); axis equal axis off set(h,'EdgeColor','r'); drawnow; subplot(224) imagesc(DepthMap_e); colormap gray(256) axis equal set(gca,'XTick',[],'YTick',[]); set(gca,'Box','off'); title('Estimated Depth Map') drawnow;